- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Статья, чтобы понять разницу между шаговыми двигателями и сервоприводами и серводвигателями.
I. Отличия шаговых двигателей от сервоприводов и серводвигателей
Шаговый двигатель: электрический импульсный сигнал, преобразующий угловое или линейное смещение частей шагового двигателя элемента управления с разомкнутым контуром. Проще говоря, он использует электрический импульсный сигнал для управления углом и количеством поворотов. Поэтому он полагается только на импульсный сигнал, чтобы определить величину вращения. Поскольку датчика нет, угол остановки может отклоняться. Однако точный импульсный сигнал минимизирует отклонение.
Серводвигатель: используйте схему сервоуправления для управления скоростью двигателя через датчик для управления положением вращения. Таким образом, контроль положения очень точный. И скорость вращения также варьируется.
Сервопривод (электронный сервопривод): Основным компонентом сервопривода является серводвигатель. Он содержит схему управления серводвигателем + комплект редуктора. Ах да, серводвигатель не имеет редуктора. И сервопривод имеет редуктор.
В случае с ограничительным сервоприводом угол поворота рукоятки направления определяется потенциометром под выходным валом. Управление сервосигналом представляет собой сигнал с широтно-импульсной модуляцией (ШИМ), при этом микроконтроллер может легко генерировать этот сигнал.
II. Основной принцип шагового двигателя
Как это работает:
Обычно ротор двигателя представляет собой постоянный магнит, и когда ток течет через обмотки статора, обмотки статора создают векторное магнитное поле. Это магнитное поле заставит ротор вращаться на угол, так что направление пары магнитных полей ротора будет таким же, как направление магнитного поля статора. При этом вектор магнитного поля статора поворачивается на угол. Ротор также вращается под углом к этому магнитному полю. Для каждого входного электрического импульса двигатель вращается на один угловой шаг вперед. Его выходное угловое смещение пропорционально количеству входных импульсов, а скорость вращения пропорциональна частоте импульсов. Изменяя порядок включения обмоток, двигатель меняет направление. Следовательно, число и частота импульсов, а также порядок подачи питания на обмотки каждой фазы двигателя можно контролировать для управления вращением шагового двигателя.
Принцип тепловыделения:
Обычно встречаются все виды двигателей, внутри которых находится железный сердечник и обмотка. Сопротивление обмотки, мощность будут вызывать потери, размер потерь и сопротивление, а ток пропорционален квадрату, который часто называют потерями в меди. Если ток не является стандартным постоянным током или синусоидальной волной, также будет вызывать гармонические потери; Сердечник имеет эффект вихревых токов гистерезиса, в переменном магнитном поле также будут возникать потери, связанные с размером материала, током, частотой, напряжением, которые называются потерями в железе. Потери меди и железа проявятся в виде выделения тепла, что повлияет на эффективность двигателя. Шаговый двигатель обычно обеспечивает точность позиционирования и выходной крутящий момент, эффективность относительно низкая, ток, как правило, больше, а гармонические компоненты высоки, частота тока чередуется со скоростью и изменением, поэтому шаговые двигатели обычно имеют перегрев, и ситуация более серьезная, чем обычный двигатель переменного тока.
III. Конструкция руля
Сервопривод в основном состоит из корпуса, печатной платы, приводного двигателя, редуктора и элемента определения положения. Принцип его работы заключается в том, что приемник отправляет сигнал на сервопривод, а микросхема на плате заставляет бессердечный двигатель начать вращение, а мощность передается на поворотный рычаг через редуктор, и в то же время детектор положения отправляет сигнал обратно, чтобы определить, достиг ли он позиционирования или нет. Детектор положения на самом деле представляет собой переменный резистор. Когда сервопривод вращается, значение резистора будет соответствующим образом меняться, и угол поворота можно узнать, определив значение резистора. Общий серводвигатель представляет собой тонкую медную проволоку, обернутую вокруг трехполюсного ротора, при прохождении тока через катушку создается магнитное поле, а на периферии магнита ротора создается отталкивание, которое, в свою очередь, создает силу вращения. Согласно физике, момент инерции объекта прямо пропорционален его массе, поэтому чем больше масса объекта, который нужно вращать, тем больше необходимая сила. Чтобы добиться высокой скорости вращения и низкого энергопотребления, сервопривод изготовлен из тонких медных проводов, скрученных в очень тонкий полый цилиндр, образуя очень легкий полый ротор без полюсов, а магниты размещаются внутри цилиндра, который представляет собой двигатель с полой чашкой.
Для различных условий работы существуют сервоприводы с водонепроницаемой и пыленепроницаемой конструкцией; и в соответствии с различными требованиями к нагрузке существуют пластиковые и металлические шестерни для сервоприводов, а металлические шестерни для сервоприводов, как правило, являются высокомоментными и высокоскоростными, с тем преимуществом, что шестерни не будут сколы из-за чрезмерных нагрузок. Сервоприводы более высокого класса будут оснащены шарикоподшипниками, чтобы сделать вращение более быстрым и точным. Существует разница между одним шарикоподшипником и двумя шарикоподшипниками, конечно, два шарикоподшипника лучше. В новых сервоприводах на полевых транзисторах в основном используются полевые транзисторы (полевые транзисторы), преимуществом которых является низкое внутреннее сопротивление и, следовательно, меньшие потери тока, чем у обычных транзисторов.
IV. Принцип работы сервопривода
Из ШИМ-волны во внутреннюю цепь для генерации напряжения смещения контактор-генератор через редуктор приводит в движение потенциометр, так что, когда разница напряжений равна нулю, двигатель останавливается, чтобы достичь эффекта сервопривода.
Протоколы для ШИМ сервоприводов одинаковы, но последние появившиеся сервоприводы могут отличаться.
Обычно протокол таков: ширина высокого уровня в пределах 0,5–2,5 мс для управления сервоприводом при повороте под разными углами.
V. Как работают серводвигатели
На рисунке ниже показана схема управления серводвигателем, выполненная с использованием операционного усилителя мощности LM675, а двигатель представляет собой серводвигатель постоянного тока. Как видно из рисунка, на силовой операционный усилитель LM675 подается напряжение 15В, причем напряжение 15В добавляется на синфазный вход операционного усилителя LM675 через РП 1, а выходное напряжение LM675 добавляется на вход серводвигателя. Двигатель оснащен генератором сигналов измерения скорости для определения скорости двигателя в режиме реального времени. По сути, генератор сигналов скорости является своего рода генератором, и его выходное напряжение пропорционально скорости вращения. Выходное напряжение генератора G сигнала измерения скорости подается обратно на инвертирующий вход операционного усилителя в виде сигнала ошибки скорости после схемы делителя напряжения. Значение напряжения, установленное потенциометром задания скорости RP1, добавляется к синфазному входу операционного усилителя после деления напряжения на R1.R2, что эквивалентно опорному напряжению.
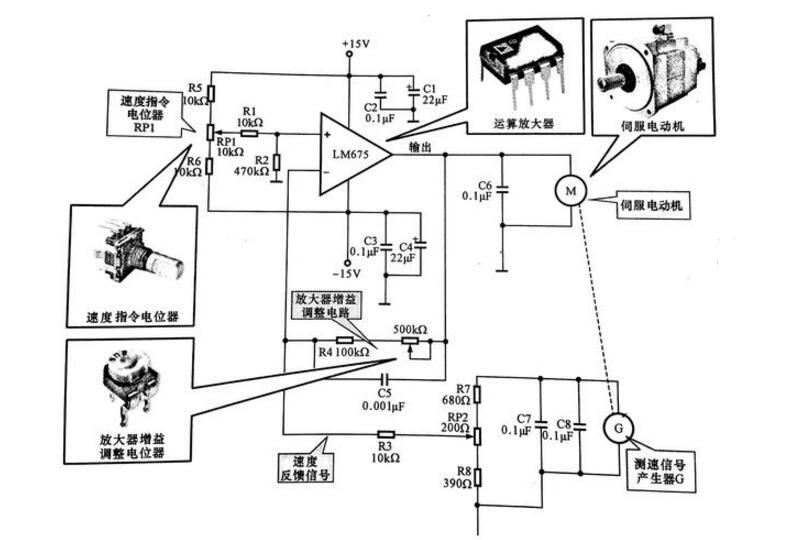
Схема управления серводвигателем
Серводвигатель: Обозначается буквой M, обозначающим серводвигатель, и является источником энергии для системы привода. Операционный усилитель: обозначается названием схемы, т. е. LM675, представляет собой усилитель в схеме управления сервоприводом, который обеспечивает ток возбуждения для серводвигателя.
Потенциометр задания скорости RP1: устанавливает опорное напряжение операционного усилителя в цепи, т. е. настройку скорости. Потенциометр регулировки усиления усилителя RP2: используется в схеме для точной настройки усиления усилителя и размера сигнала обратной связи по скорости соответственно.
При изменении нагрузки двигателя изменяется и напряжение, подаваемое обратно на инвертированный вход операционного усилителя, т. е. при увеличении нагрузки двигателя скорость уменьшается, а также уменьшается выходное напряжение генератора сигналов скорости, так что напряжение на инвертированном входе операционного усилителя уменьшается, а разница между этим напряжением и опорным напряжением увеличивается, а выходное напряжение операционного усилителя увеличивается. И наоборот, когда нагрузка становится меньше и скорость двигателя увеличивается, выходное напряжение генератора сигнала измерения скорости возрастает, напряжение обратной связи, добавленное к инвертированному входу операционного усилителя, увеличивается, разница между этим напряжением и опорным напряжением уменьшается, выходное напряжение операционного усилителя уменьшается, и скорость двигателя соответственно уменьшается, так что скорость вращения может автоматически стабилизироваться на заданном значении.