- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Главная
>
Продукты > Драйвер серводвигателя переменного тока > Драйвер серводвигателя переменного тока серии A5
Продукты
- Серводвигатель переменного тока
- Серводвигатель постоянного тока
- Шаговый двигатель с замкнутым контуром
- Шаговый двигатель Hybird
- Драйвер шагового двигателя Hybird
- Драйвер шагового двигателя с замкнутым контуром
- Драйвер серводвигателя переменного тока
- Встроенный шаговый двигатель
- Драйвер серводвигателя постоянного тока
- Винтовой двигатель
- Шаговый драйвер типа RS485, CAN или Ethercat
- Планетарный редуктор
- Контроллер ПЛК
- Сенсорный экран ЧМИ
- Комплект драйверов серводвигателя переменного тока Ethercat
- Комплект драйверов серводвигателя переменного тока A8
- Встроенный серводвигатель
новые продукты
 Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 235 Нм 37 кВт AC380 В 73 А 1500/2000 об/мин IP65
Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 235 Нм 37 кВт AC380 В 73 А 1500/2000 об/мин IP65 Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 191 Нм 30 кВт AC380 В 52 А 1500/2000 об/мин IP65
Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 191 Нм 30 кВт AC380 В 52 А 1500/2000 об/мин IP65 Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 140 Нм 22 кВт AC380 В 44,7 А 1500/2000 об/мин IP65
Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 140 Нм 22 кВт AC380 В 44,7 А 1500/2000 об/мин IP65 Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 88 Нм 18,5 кВт AC380V 31,6A 1500/2000 об/мин IP65
Комплект драйверов серводвигателей переменного тока Lichuan ВЫСОКАЯ МОЩНОСТЬ 88 Нм 18,5 кВт AC380V 31,6A 1500/2000 об/мин IP65- Все новые продукты

Драйвер серводвигателя переменного тока серии A5
Прямые поставки драйвера серводвигателя переменного тока серии A5 в Китае. LICHUAN® — производитель и поставщик серводвигателей переменного тока серии A5 в Китае.
Отправить запрос
Описание продукта
LICHUAN® тепло приветствует вас в оптовой продаже серводвигателя переменного тока серии A5 с нашего завода. Наша продукция сертифицирована CE и в настоящее время имеет большой объем заводских запасов. Мы предоставим вам хороший сервис и заводские цены со скидкой.
Характеристики драйвера серводвигателя A5 220 В переменного тока
Среда установки
◆ Рабочая температура/влажность: 0~55℃ (без инея), относительная влажность < 90% (без конденсации).
◆ Температура/влажность хранения: -20~65℃ (без инея), относительная влажность < 90% (без конденсации).
◆ Атмосферная среда: внутри шкафа управления, без агрессивных или легковоспламеняющихся газов, масляного тумана, пыли и т. д.
◆ Высота: ниже 1000 м над уровнем моря.
◆ Вибрация: < 0,5G (4,9 м/с2), 10–60 Гц (прерывистая работа).
◆ Защита: сам сервопривод не имеет защиты, поэтому его необходимо устанавливать в хорошо защищенный электрический шкаф и защищен от проникновения агрессивных или легковоспламеняющихся газов, проводящих предметов, металлической пыли, масляного тумана и жидкостей.
1. Поддержка 17-битного энкодера. 23-битный энкодер серводвигателя переменного тока.
2. Подходит для номинальной мощности серводвигателя переменного тока от 50 Вт до 3,8 кВт.
◆ Температура/влажность хранения: -20~65℃ (без инея), относительная влажность < 90% (без конденсации).
◆ Атмосферная среда: внутри шкафа управления, без агрессивных или легковоспламеняющихся газов, масляного тумана, пыли и т. д.
◆ Высота: ниже 1000 м над уровнем моря.
◆ Вибрация: < 0,5G (4,9 м/с2), 10–60 Гц (прерывистая работа).
◆ Защита: сам сервопривод не имеет защиты, поэтому его необходимо устанавливать в хорошо защищенный электрический шкаф и защищен от проникновения агрессивных или легковоспламеняющихся газов, проводящих предметов, металлической пыли, масляного тумана и жидкостей.
1. Поддержка 17-битного энкодера. 23-битный энкодер серводвигателя переменного тока.
2. Подходит для номинальной мощности серводвигателя переменного тока от 50 Вт до 3,8 кВт.
Технические характеристики
| Входная мощность | Однофазный 220 В переменного тока | |
| Работающий среда |
Температура | 0~45℃ |
| Влажность | ≤90% относительной влажности, без конденсата | |
| Элейация | Высота ≤1000 м. | |
| Монтаж среда |
Никакого коррозионного газа, горючего газа, масляного тумана или пыли. | |
| Режим установки | Вертикальный | |
| Кодер | Поддержка 17-битного инкрементного/абсолютного энкодера, 23-битного инкрементного/абсолютного энкодера | |
| Выходная мощность | Выходное напряжение 24 В | 100 мА, подача питания на порт DI и импульсный порт. |
| Управляющий сигнал | Цифровой вход | 8-канальный общий цифровой вход, функция может быть настроена |
| Цифровой выход | 6-канальный цифровой выход, функцию можно настроить. | |
| Импульсный сигнал | Вход | 2-канальный высокоскоростной вход: поддержка импульса до 1 МГц, рабочий цикл 50%. Поддержка импульсного режима ввода : PULS+DIR,A+B,CW+CCW |
| Выход | 3-канальный высокоскоростной импульсный выход, форма выходного сигнала: дифференциальный сигнал 5 В l канал Z сигнал несимметричный выходной сигнал. | |
| Аналоговый сигнал | Вход | 2-канальный аналоговый вход, разрешение 12 бит, входной диапазон -9,5~+9,5В. Среди них AI2 фиксируется как вход ограничения крутящего момента. |
| Выход | Никто | |
| Функция связи | Связь RS485 , протокол ModbusRTU . | |
| Панель дисплея и клавиши управления | 5 клавиш (режим, установка, влево, вверх, вниз) и 6 газоразрядных ламп. | |
| Тормозной резистор | Встроенный тормозной резистор 50 Вт, 40 Ом. Для частых случаев торможения требуется внешний тормозной резистор. | |
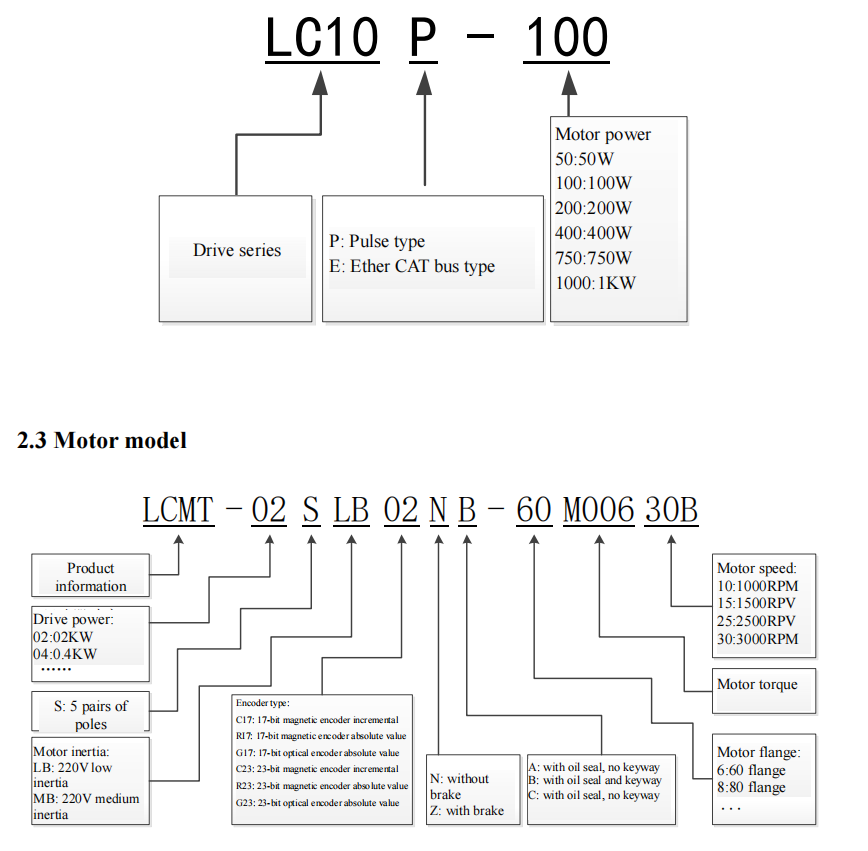
СХЕМА ПОДКЛЮЧЕНИЯ СЕРВОПЕРИФЕРИЧЕСКОГО ОБОРУДОВАНИЯ
Абстрактная схема подключения сервопривода Lichuan серии LC10P и несколько часто используемых настроек параметров.



Машина для производства продукции на заводе Личуань
-

Резьбовая машина -

Оборудование для нанесения покрытий -

Машина для маркировки волокон -

Завинчивающая машина -

Испытательная машина -

УФ-принтер
-

Автоматическая паяльная машина -

Удерживающая машина для испытания крутящего момента -

Винтовая машина -

Осциллограф
Промышленные приложения
-

Роботизированная рука -

Станок для лазерной резки
-

3D-печать -

Станок с ЧПУ -

Автоматическое подтверждение -

Гравировальный Станок
Горячие Теги: Драйвер серводвигателя переменного тока серии A5, Китай, производители, поставщики, фабрика, по индивидуальному заказу, сделано в Китае, дешево, CE, долговечно, качество
Связанная категория
Серводвигатель переменного тока
Серводвигатель постоянного тока
Шаговый двигатель с замкнутым контуром
Шаговый двигатель Hybird
Драйвер шагового двигателя Hybird
Драйвер шагового двигателя с замкнутым контуром
Драйвер серводвигателя переменного тока
Встроенный шаговый двигатель
Драйвер серводвигателя постоянного тока
Винтовой двигатель
Шаговый драйвер типа RS485, CAN или Ethercat
Планетарный редуктор
Контроллер ПЛК
Сенсорный экран ЧМИ
Комплект драйверов серводвигателя переменного тока Ethercat
Комплект драйверов серводвигателя переменного тока A8
Встроенный серводвигатель
Отправить запрос
Пожалуйста, не стесняйтесь дать свой запрос в форме ниже. Мы ответим вам в течение 24 часов.
сопутствующие товары